Reductionist Magic 5: Objects and solidity
What is an "object", anyways?

Finally we come to, quite possibly, the biggest definition question in all of magic. What is an “object”? And what kind of objects are “solid”?
Many, many spells say they do something to “an object”: e.g. Polymorph Any Object (sic) does exactly what it says on the tin. Naturally, all these spells are reliant on a human understanding of what an “object” is, and as such all run into the same issues of indeterminacy. Answering this question in an unambiguous manner would thus help us resolve a myriad of issues. Similar issues arise when discussing “solid objects”.
Here, I’ll try to answer these two questions, or at least provide tools others can use to design their own definition for these words. Ironically, answering the question of what is “solid” turns out to be easier than answering what is an “object” in general, so that’s what we’ll start with.
As usual, if you are confused about any terms, make sure to check out the glossary, and if you are looking for other posts, check out the blog map. Finally, if you are reading this in an email, your email client (specifically, gmail) may have cut the post short - sorry for that, but it’s long with a lot of images.
What is a solid object?
Previously, I mentioned that line of effect is blocked by solid objects, because spells interact with the physical world and can’t squeeze past solid objects. Some spells like Fleeting Defect or Shatter likewise refer to “solid objects” in their description. This presents a question - what is a “solid object”? How exactly does a spell interact with them such that they block it’s path or help it determine what to act on, and what consequences are there to such a bridging law? In this section I will primarily be talking about line of effect, and not other solidity uses.
1. Why is this not trivial?
You may remember a diagram like this one from school:
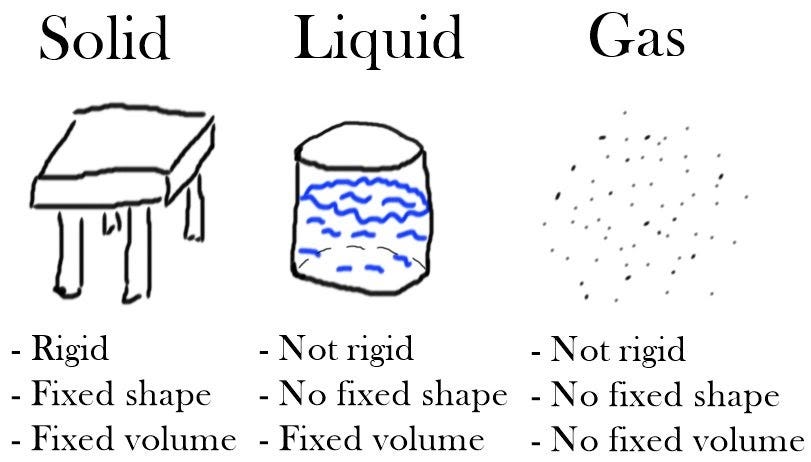
It purports to show the “three states of matter” that, supposedly, encompass everything we find in common life. Sometimes a fourth state is added for “plasma”, and sometimes yet more are added for the sorts of things only found in physics laboratories (e.g. Bose-Einstein condensate). If you were to believe this diagram, then the question of what is a solid object is trivial - it’s everything that isn’t a liquid, a gas, or needs industrial equipment to make. The only problem here is that this diagram is nothing but a bold-faced lie.
(Or, if you are being charitable, a heuristic presented without much explanation to it’s limitations)
We don’t have to go to a lab to demonstrate that this diagram is useless. Any kitchen will suffice. Take a cup of rice - all grains in it are clearly solids. Now put them in a pot of water and boil for an hour. At first, the grains will become soft, but will still keep their shapes. But the longer you boil, the more they will lose their coherency - their surfaces will turn into mush and mix together, until you are left with rice paste - a pretty homogenous liquid. Here is my question: at what exact point in time do the grains turn from solid to liquid?
This transition isn’t like ice melting, where you have a clear distinction between solid ice and liquid water. Instead, you will have centers of the grains (fairly solid) transitioning smoothly into the surrounding water (liquid). For any property you care to name (density, consistency, viscosity, etc) it’s value will go from solid to liquid very smoothly. The only sensible conclusion we can make here is that rice pase is neither a solid nor a liquid.

Another example can be thick ketchup or mustard. If you tried squirting a bunch of it on a plate, you would see that it doesn’t spread out like water: the shape of the surface is pretty stable, with bumps and depressions. However, it does still spread out a decent amount. So it spreads out like a liquid, but keeps some shape like a solid - what is it?
How about sand: liquid or solid? Well, you can build sand castles out of it, so it seems pretty solid. Individual grains are made out of quartz - a very solid material. But if you send some air through it, it suddenly behaves exactly like a liquid.
In fact, we can even see intermediate stages between solids and liquids on phase diagrams (Look here under “binary mixtures”). There is a solid phase, a liquid phase, and right between them is a neither phase. Here is a youtube video of a solder that melts into that phase: it behaves like a paste, instead of either a solid or a liquid.

How about bitumen? It’s a solid, found in mines, or produced from oil. Look at the picture: it looks exactly like a rock. If you weren’t a geologist, and I told you this was a rock, you’d believe me. But if you leave it alone for a decade, it drips like a liquid.
The core problem here is that this whole solid/liquid/gas distinction does not exist in physics. It’s an entirely human-centric definition, based on how humans interact with various materials. Is it hard and requires effort to break or tear with human hands? Solid. Can you drink or pour it? Liquid. Breathable? Gas. If it drips on the scale of a decade it’s solid, because no human will be standing there for a decade looking at it. Somewhere in between two categories? That’s fine, because human words aren’t strict definitions, they are similarity clusters.
But when it comes to spells, we do need a strict definition, because we have a very binary state: either the spell goes through a barrier or it doesn’t, either it affects something or it doesn’t. We thus need to come up with a test for a property that exists solely within our own heads.
2. Intuitions
Now that we know we are trying to approximate human intuitions, we will need some examples to ground our thinking. Let’s start with some clear cases: bitumen, ice, granite and wood are solid, while water, ketchup, ink and fast flowing lava are liquid. One side is very rigid, the other flows nicely.
How about something more questionable, like a slushie? Well, to my intuition, this is a case of a bunch of solids suspended in a liquid. This is how I think of all kinds of suspensions. However, when solid objects get small enough - for example, like flour in water - I no longer seem to think of it as a suspension, but as just a regular liquid. We can thus see there is some size component to the intuition of solidity.
Let’s now consider shape. Solids aren’t supposed to change their shape a lot. Wooden table is a central example of solidity - it keeps its shape until it’s broken. How about a sheet of paper? Well, it can easily bend and deform, so the shape isn’t stable, even for “temporary” deformations (bent square being, geometrically, a different shape from a straight square). How about a rope? Almost no stable shape, you can bend it any which way without permanent damage. It seems that solids can change shape very easily, in fact, and still intuitively stay solid.
I put it to you that the concept of “shape” as it relates to solidity has nothing to do with actual geometric form or topology, and everything to do with there being some human-recognizable invariant regarding the form. For a rope it’s the fact that you could untie it and get the same length of rope back. For living creatures it’s that their size, weight, number of arms and so on doesn’t change over time. For a rock it’s the actual shape of that rock. Water doesn’t have any such invariants, and so doesn’t have a “shape”.
How about rigidity? In my opinion, rigidity has to do with how difficult it is for a human to make changes to the object, or how quickly it changes on human timescales. For example, rice paste is not rigid because it can be pushed through with a pinkie finger, while a wooden table is rigid. This is a different thing compared to how easy the object is to bend: for example, bending paper is pretty easy, but pushing a finger through the paper is difficult.
Finally, it’s important to consider velocity. In my opinion, wherever something is a solid object shouldn’t depend on it’s relative speed: for example, water rushing at you at 300 meters per second is still liquid, even though it won’t feel like it.
3. Tests, not definitions
Before the next section, I must make a small note regarding the difference between definitions and tests. Definitions can be either intensional (defining a word in terms of other words) or extensional (giving an example, and hoping the listener will connect the dots). Neither of these are satisfactory in our case. Using other words is confusing and will lead to a very lengthy, unreadable paragraph. On the other hand, giving examples is actively unhelpful, because as I have covered in the previous section, our intuitions on this topic are already quite confused.
Instead, I will be describing tests. Test is something akin to what Yudkovsky calls “an intensionally defined procedure which, when executed, will lead you to an extensional example”. It is an experimental setup that, when performed on something, gives you a binary answer: this item belongs to category A or B (e.g. solid or not solid).
Tests, compared to other definition methods, have a big advantage in that, if a disagreement arises, it can be resolved by referring to third-party resources. In a way, they are “objective” - after all, if a test were to be performed in reality, then it would have a single objective answer. The only subjectivity inherent in the test comes from different views on what would happen should the test be performed - after all, you are probably not trying to do it for real, but rather imagining it. And this kind of subjectivity is relatively easy to clear up by researching regular sciences - physics, biology, and whatnot. Compared to disagreements about wordy definitions, this kind of problem is much easier to resolve.
4. Test of solidity
Having discussed our intuitions regarding solidity, we can now derive a test for wherever something is or isn’t solid. Basing it on invariants of form of the object seems difficult to me: instead, we can use rigidity. After all, if something is rigid, it probably isn’t changing it’s form either. Therefore, I propose the pinkie test: something is considered solid if you can’t push through it with a force equivalent to a relaxed pinkie finger. Otherwise, it’s not solid. I leave it as an exercise to the reader to figure out the appropriate pressure value in pascals.
5. Counterfactual worlds
Before we get to the question of a spell bridging law - namely, how does a spell implement this test within the setting of the game - there is a meta topic to discuss. This is the idea of using counterfactual worlds for tests.
For example, imagine that we had a category for objects that were strong enough to resist a hit from a hammer, with the test for it being to hit them with a hammer and see if they break. This is a conclusive test (assuming a satisfactory definition of break), and it’s easy to implement as part of a spell (create a magic hammer, smash into the object). There is just one problem: it is potentially destructive. It would thus be useless for any application where we want to know category membership without breaking things.
We can, however, have our cake and eat it too by conducting the test in a counterfactual world. Basically, the spell would know what would happen if the test was performed without performing it. As an intuition pump, you can imagine the spell running a perfect simulation of the real world, with the only difference being that of the necessary conditions for the test (e.g. object being hit with a hammer). Once the simulation is done, the spell would know how to act in the real world.
This can make spell limitations (e.g. only working on solid objects) sound as very arbitrary, “computer-like” rules: as if the spells would only do this because some arbitrary programmer decided this is how it should be. Of course, this is just an artifact of how we are designing our theory of magic: we simply don’t have the time to come up with a more natural theory that would make this testing process inherent to how the spells behave, as impossible to separate from it as solidity of real objects can’t be separated from electromagnetism. For example, it could be either a lower level law of physics (akin to interference effects in quantum mechanics) or the entire test concept may be simply a convenient abstraction layer over what is really going on.
Second problem for this method is that it violates the principle of locality: because of the counterfactual world intuition, the spell can potentially receive information from an arbitrary distance away. This is a big issue. It can be avoided using two methods. First, I will avoid using counterfactual worlds unless I am forced to do so: it just so happens that object definitions is one of those things that is made much easier by using it. Second, we can say that the spell only uses information it can access, because it initially suffuses the local environment and scans it. That way no new information is added to the spell, and the counterfactual world intuition is in effect just a complex calculation.
Canny players have no doubt already came up with a way to prove P=PSPACE using the counterfactual worlds principle. If you know how to do that, please message me. Until then, I think it’s fairly solid.
6. Spell bridging law
We are left with one last question: how do spells interact with matter in a way that leads to the same kinds of results as the pinkie test? Essentially, how exactly is the Line of Effect implemented in physics?
Naively, we can say that the spell is simply attached to something (which I will call a tester) - a pocket of air, a tiny ectoplasmic pearl, or similar - that is easily crushed, and the bridging law is then interaction of this item with the surrounding environment. If the tester is crushed, spell does not go through, and otherwise it does. However, this doesn’t work: as I’ve mentioned above, most spells tend to travel as fast as arrows in flight. At that speed, water is hard as stone, and so would crush our testers. We can’t use the spell itself to propel the tester if the spells move too fast for the tester to work. Tester has to have its speed equal to the average speed of the material patch it is testing for solidity.
At this point, we basically have four possibilities:
For slower moving spells, attach the tester to the spell anyways. This will result in them having a visible effect on the environment (moving leaves around, making small dust clouds, etc) and treating fast-moving water as solid. This can be cool in itself, and is a very simple test implementation.
For the rest of the spells, do the test along the entire spell trajectory with many different testers. Testers would be created well ahead of the main spell body, will be anchored to the local matter, and will be moving slowly relative to it. They would push forwards with a force equivalent to a pinkie finger, and if they can’t push through the material, we know it’s solid. Because many testers are being used, the boundary of where the tests have concluded can be moving in space at spell speed, even if the testers themselves move slowly. This effect is similar to how a light spot can break the speed of light. This will have similar effects on the environment as described above, but across most of the spell trajectory very quickly. Furthermore, these environmental effects will penetrate into and through solid objects: new tests have to start well ahead of the spell, and thus will start before some of the previously started tests have concluded. This can make spell usage visible from beyond solid walls.
Test in a counterfactual world.
Test well in advance of the line of effect information being needed, and then save this information somewhere. The way I see it, this can be implemented in two ways. First, as a global information repository accessible for all mages (with global environment getting regularly re-tested, and thus producing all the aforementioned effects all the time all over the world). Second, it can be a subconscious effect centered on the caster themselves, re-testing their local environment and saving test information into their mind. This will have a strange effect when the caster is moved around quickly: until they re-test their new environment, they would lose the ability to cast Line of Effect spells.
For all these cases, tester design itself is obvious and doesn’t need specification.
Overall, I am undecided wherever counterfactual world setup is necessary here. Doing these tests in real space would make magic somewhat more visible to non-mages, and is generally kinda neat, but the seeming arbitrariness of needing to do it is somewhat annoying to me. Doing them in a counterfactual world removes these effects, but requires us to use the counterfactual worlds themselves, which is not great either.
Final option of doing regular re-tests on the local environment is the least appealing to me overall. It’s going to make mages far too obvious to people around them, and basically impossible to keep in the same building as any paper documents. Nonetheless, some interesting non-DnD worldbuilding could come out of it.
Object selection
Now that we’ve cut our teeth on defining solidity, let’s get to the more difficult question: how to define and select objects to affect with spells.
1. The word object
Let’s start with the basics. There is no such thing as an “object” in physics - just atoms following general laws. An “object”, as humans use it, is a neural category - a way to assign a label to some collection of matter, so as to make it easier to think about and manipulate. Neural categories are, by their nature, fuzzy. Our job here is thus to deconstruct this category, figure out what properties make us group things into it, and then reconstruct a new, non-fuzzy definition for an object that broadly fits our previous fuzzy definition.
Right from the outset, we can say one thing about objects - they are collections of matter, such as atoms, electrons, etc. Anything that’s not matter is not an object and can’t be part of one. To figure out the other properties, we’d need to do a little research.
2. Rules overview
Let’s start by looking at what the rules have to say about objects. Skip this entire section if you aren’t interested in nitpicky rules lawyering.
Under “Material components” we have “A material component consists of one or more physical substances or objects that are annihilated by the spell energies in the casting process” We thus know that rules draw a distinction between a “substance” and an “object”; furthermore, anything noted as a spell component is either one or another.
Under “Saving Throws: Items Surviving after a Saving Throw” we have “If a creature rolls a natural 1 on its saving throw .. an exposed item is harmed ... Refer to Table... Determine which four objects carried or worn by the creature are most likely to be affected and roll randomly among them”. We thus know that rules assume that worn equipment is an object; furthermore, the table provided in this section gives a good list of explicit examples. Notable examples that will come up later are armor, helmets and jewelry.
Animated Objects. We don’t have a lot to draw from this section, but we do learn that manacles, catapults, ships and wagons count as objects.
Polymorph any Object - this spell, by itself, is not interesting. However, it says that it can duplicate the effects of Transmute Mud to Rock. There can be two interpretations of this: either we assume spell duplication is bolted on to the other effects of the spell (as in, the spell can do it’s main effect and also duplicate other spells), or we have to conclude that a puddle of mud or sand counts as an object, and this spell simply affects them as normal.
Shrink Item - this spell says that “Even a burning fire and its fuel can be shrunk by this spell”. This can be interpreted in two ways: one, that we can shrink a burning plank while it’s burning, or two, that an ordinary campfire, made up out of multiple individual pieces of wood, is an object.
Brilliant Energy magic weapon property mentions that “A brilliant energy weapon cannot harm undead, constructs, or objects”, bringing our attention to discrepancies between how rules treat creatures and objects.
Locate Object seems to treat words “item” and “object” interchangeably, so I will assume that’s the general position of the rules.
5th edition of DnD has this to say in regards to objects: “an object is a discrete, inanimate item like a window, door, sword, book, table, chair, or stone, not a building or a vehicle that is composed of many other objects”. Because this obviously contradicts two already mentioned explicit examples of objects - a wagon (vehicle) and a ship (vehicle, also basically a building on water) - I will discard this definition. This is one of the many reasons why I specified I will be dealing with Pathfinder rules in this series - DnD rules from one edition can easily contradict other ones.
Of course, rules don’t give us a clear definition of objects: if they did, I wouldn’t be writing this article, I would simply link an appropriate page in the rules.
3. Previous research
You didn’t think I was the first person to ask the question of object definitions, did you?
Of course not. It’s time for the most exciting part of scientific papers - literature review.
Here we can find people agreeing that rules don’t state what is and isn’t an object, and giving more reasons for why creatures get special treatment. Overall, nothing new. One person mentions that 3.0 or 3.5 used to have a definition of an object - if that’s the case, I haven’t been able to find it.
Here some more people discuss this subject, and their best idea is to use “common sense” - an idea that is obviously doomed to failure, given that their common sense leads to results that are incompatible with the explicit object examples we’ve discussed in subsection 2. At the very least, this can make us feel a bit more confident there is no explicit definition of object in the rules.
Overall, a wash. But we aren’t limited to looking at just DnD research: we can look at other sciences. Specifically, the science of human object recognition.
Now, as far as my cursory search can tell, no scientist has tried to study the question of what makes humans classify something as an “object” or “not an object”. Unless you are dealing with our pretty specific case of trying to create a system of magical physics, there is very little point in asking this question. Instead, scientists study how good people are at recognizing an object on a picture, based on how occluded or modified that object is.
From this field, we have some exciting results, such as the Recognition by Components Theory. According to this theory, humans break objects up into simple geometric primitives (geons), such as cylinders, bricks, handles, etc, and use the relative positions of these primitives to recognize a particular object. There is research demonstrating that this is not the whole story (and, logically, humans can still recognize objects that don’t have a specific geometric form, like a tree, for what they are), but I think it’s still pointing at a very important truth.
If we accept RBC theory as fundamental to human object recognition, then we must conclude that boundaries are essential to our understanding of objects. Indeed, anything that destroys or significantly modifies the geons risks making an object unidentifiable to humans. We can then make an educated assumption that if a human mind can’t parse out any geons in an image, it couldn’t identify any objects within that image, and thus (because the idea of objects is human-centric) there would be no objects in that image.
I tried for a long time to construct a definition of objects based on probabilistic geon maps. Basic idea would have been that your mind tries to split the space into geons, and construct objects as continuous groupings out of geons. Anything that has a unique geon split is an object, while anything where confusion arises regarding this split (e.g. you can plausibly imagine the thing as a brick or a sphere, because of how vague the boundaries are) is not an object. If it worked, it’d have been a really neat theory - unfortunately, try as I might, I can’t make it fit. It simply remains too vague and ultimately unusable.
Despite that failure, this research gives us some helpful tips for how human intuitions work. As you’ll see below, these ideas are confirmed by an analysis of my own thinking.
4. Intuitions
Look at this pen.

It’s a pretty nice pen. To me, it seems pretty obvious we can label this pen as “an object”. Whatever definition of objects we end up with, this pen here should be a central example. But we can also break this pen into parts:
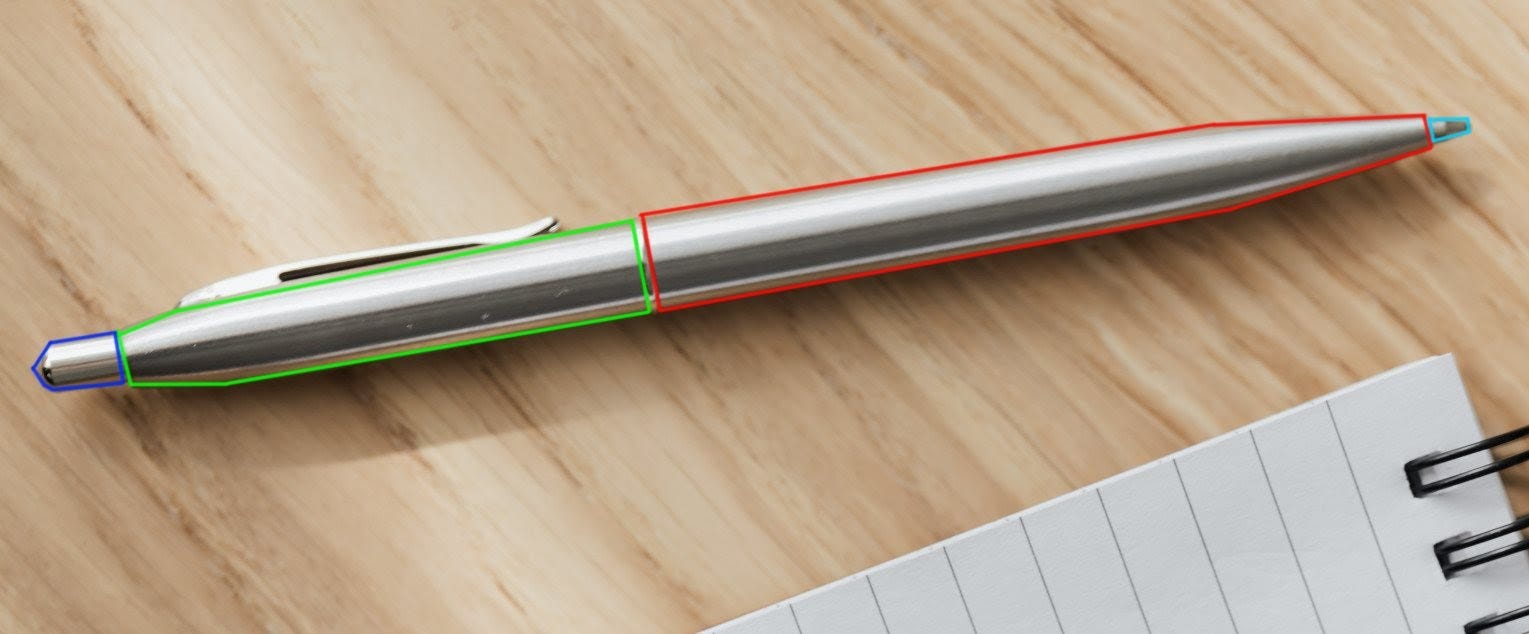
If we were to disassemble the pen, each of these parts would also be an object - they are individual metal pieces. We thus have established that objects can be assembled into bigger objects.
Let’s continue. Take the cap of the pen, and let’s assume it’s made out of pure iron - no oxide layer on the surface, no dirt, nothing. Obviously, it’s still an object. Now encase it in a block of iron - the same material as the cap. The cap is still “there” - after all, we haven’t removed any material - but it no longer makes sense to distinguish it as an object separate from the block. On the other hand, if we encased it in copper, it would still seem to make sense to talk about a cap encased in copper.
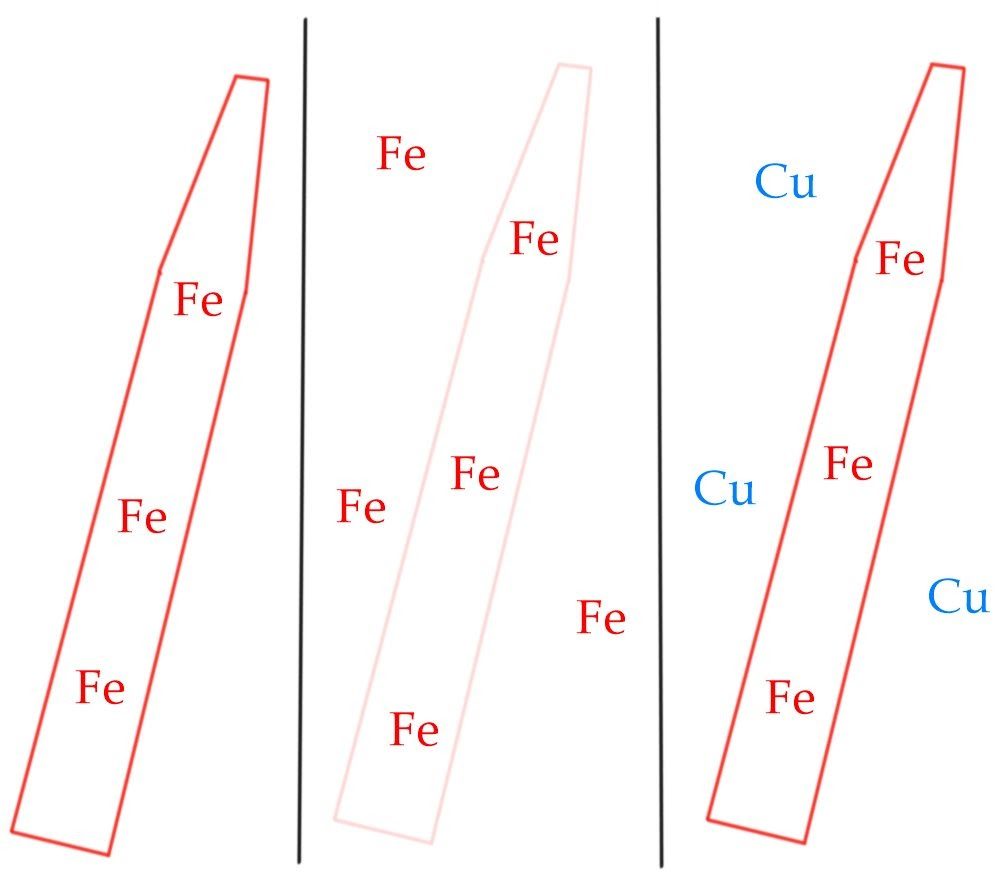
This intuition pump tells me that objects have boundaries. Object boundary has to encase all the matter that is part of the object, and if no coherent boundary can be drawn, there is no object. Furthermore, I think it’s reasonable to assume boundaries have to be “tight” to the object - any point on the boundary has to be within a small distance of at least one thing that is part of the object, otherwise it won’t make sense as the boundary.
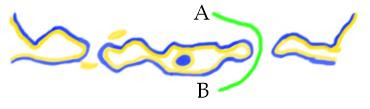
Going back a bit to the assembled pen, we can also tell that object interiors have to be connected, in the mathematical sense of the term. To put it simply, if you can separate an object into two things that you can bring a distance apart, it’s not a single object anymore: it’s at least two different objects.
At this point we can conclude that if we have two points (A and B), and a continuous line (not necessarily straight) in space between them, that doesn’t cross an object boundary anywhere, then A and B belong to the same object. This is a definition of object continuity.
Let’s now consider what a “coherent boundary” might be. We can imagine a stick made out of glass - definitely an object. Now imagine that we very quickly (quick enough it wouldn’t have time to heat up) submerged it into very hot molten glass. I think it’s sensible to talk about the rod as an object, even though it’s submerged in the same material (glass), because the surrounding material is liquid. There is a sharp change in viscosity, density and temperature right at the surface of the rod.
Now, when it comes to glass, there is no neat “solidification” temperature: instead, glass softens gradually, becoming more and more malleable, until it’s basically liquid. We can thus imagine a “transition zone” around the surface of the rod: on one side, glass is completely molten, and on the other side, it’s cool and completely solid. In between, viscosity of the glass smoothly decreases. If this zone is thin (e.g. 1/100th the thickness of the rod), intuitively the glass rod is a nice solid object with a coherent boundary. On the other hand, if this zone becomes very thick (e.g. hundreds of times thicker than the rod), I lose sight of where the solid object stops and the liquid begins.
We thus see that wherever we can draw a boundary around an object depends on the degree to which the surrounding material is similar in its properties and makeup to what is found inside the object; furthermore, if these properties change, how rapidly they change in space is important.
Here, it may be tempting to say that if there is no change in the material properties, there can’t be a boundary. Imagine two points on what we suspect to be an object, and some line in space between them, going through that object. If material properties stay constant along this line, then we have just demonstrated that those two points have to belong to the same object, right? Unfortunately, this runs head first into the mechanics of physical contact between things.
The truth is, surfaces of objects don’t behave very much like you’d expect. For example, consider what happens when you put two smooth surfaces up against another and try to slide them. There is friction between them, but, curiously, it does not depend on the apparent area of contact. This is puzzling: logically, whatever it is that causes a bonding force between objects, a larger area should lead to more bonding, and thus a larger friction force. Yet, this doesn’t seem to be the case, contrary to intuition.

What actually happens is that most of the apparent contact area is not, in fact, in contact. Instead, contact happens at small points, spread all over the area. True contact area is thus much smaller than the apparent contact area. Furthermore, this area depends on how strongly you press the two objects against one another. Higher contact force leads to deformation (elastic or plastic), and this increases the true contact area. Friction between surfaces thus mostly depends on the true contact area, and the strength of the atomic bonds between the two materials.
Now, let’s say that materials of the two surfaces are the same: for example, two steel pieces rubbing against one another. If that’s all there is, metals would instantly bond at some of the contact points: there isn’t and can’t be any actual difference between atoms belonging to the two different objects, and they will happily bond with everything nearby. This is the phenomenon at work in cold welding. In air, this does not happen nearly as often: air fills the gaps between the objects, and forms an oxide layer on the surface. Oxide does not bond to other oxide as easily, and so metals slide.
Nonetheless, complete bonding still arises constantly: there are millions of individual points of contact at every square centimetre of area, after all. All it takes to bond is to rub the oxide layer away (normal during sliding contact), and bring two clean points into contact faster than a new oxide layer can form. This is a completely normal process that happens whenever two metal pieces come into contact. When you pull these pieces apart, these locations tear - there aren’t enough of them to provide any kind of significant resistance.
However, think back to the definition of object continuity. We know that there must be an object boundary between points A and B (see image) somewhere. However, the entire path passes through material with no discontinuities in material properties. We must thus conclude that object boundaries can be present where no discontinuity in material properties exists. Similarly, sharp discontinuity does not necessarily prove that an object boundary is present: some phases of steel like pearlite are basically one huge discontinuity, which gives them very useful mechanical properties. It wouldn’t really make sense to say that something made out of this type of steel is made out of billions of microscopic objects.
Let’s move away from the material properties and start talking about kinematics. An important object intuition pump is that of “separability” - that an object can be separated from its environment and moved to a different location without suffering damage. For example, a pen can be picked up off the table easily, while a screw that has been screwed into the table surface won’t come out without damaging the table further. This is not an absolute rule - some objects are so fragile that moving them at all will risk damaging them, and points of contact constantly damage objects - but the idea remains.
On the other hand, different parts of an object shouldn’t be separable - if one part of an object is moved somewhere, all parts should move. This is how we can say that a pen is a single object, while a table with a lamp on it is two objects.
Overall, here is a list of my intuitions surrounding the question of what is an object. Some of them are less necessary, but all of them contribute to the whole:
A pen is an object
Objects can be assembled into bigger objects
Objects have boundaries
Object boundaries are tight to the object
Object boundaries are connected
Where object boundaries are depends on how different object properties are from the surrounding materials
Sharp changes in material properties make for natural boundary locations
Boundaries can pass through material with no discontinuities in material properties
Objects can be separated from their current environment without damaging either the object or the environment
Different parts of an object move together
Overall, we can see that a lot of these intuitions have to do with object boundaries. Central question of object definition then becomes how to draw these boundaries, and the definition of “object” becomes equivalent to an algorithm used to draw them.
5. Object tests
Now that we’ve collected our intuitions regarding what is an object, and did an overview of the related literature, we can finally start designing tests for wherever something is an object. Unfortunately, I don’t think any individual testing method will be suitable for every case. In fact, for most applications, you would need to have several methods acting in parallel to achieve good results. I will thus describe multiple methods, and you can pick ones most appropriate to your circumstance.
5.1 Boundary encasing
Let’s begin by considering a simple case. We have a pen lying on top of a table, and we want some “objective” way of saying that this pen is a separate object. How do we do that?
As I’ve described in the section on intuitions, there is a strong intuition that objects move as one whole, and that they can be easily separated from their environment. We can convert that intuition into a test, by trying to separate the pen from the table by a physical boundary, such as a force wall.
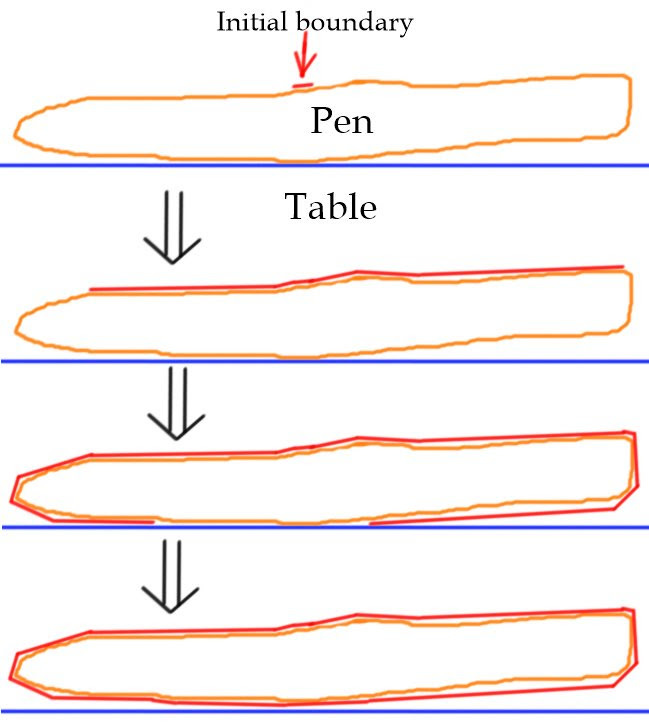
The idea here is fairly simple. We are trying to stretch a force wall over our object like a fitted sheet over a mattress. This force wall ensures that no atom bonds can penetrate it, meaning once it’s closed, internals are completely separated from their environment. Thus, if it closes, we have found an object. If it fails to enclose anything, there is no object. Obviously a sufficiently large wall would always enclose something (such as the entire planet), so to avoid that, we will impose a limit on the total area of the enclosing wall - if that limit is hit, there is no object we can affect here.
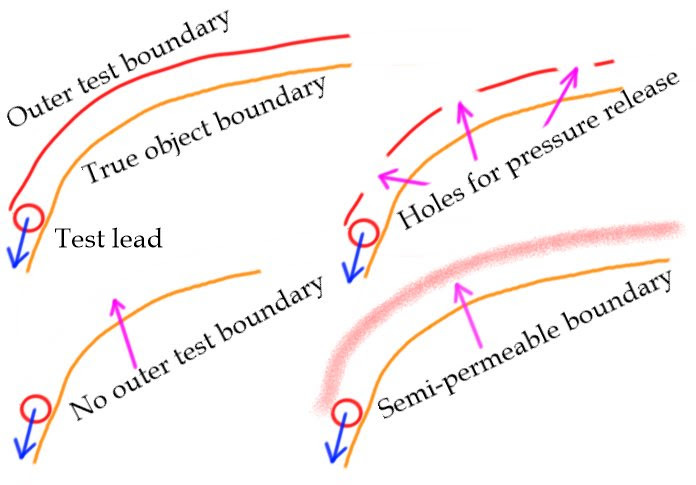
There are two key questions related to this method. First of all, how does the outer separating wall behave? Second, how does the leading edge of the wall determine where to go? Let’s start with the wall. Here, I see four simple behaviors:
First of all, the wall can be completely impermeable to all matter. This is the default for force walls. However, this introduces a potential issue: a vacuum packet will form between the wall and the object. Because we are trying to separate the object from the environment by a small distance, and the wall is impermeable, the only way for the pressure to equalize is for matter to enter through the wall’s leading edge, which may be too snug for a lot of flow to happen. Vacuum can deform the underlying object, and will introduce an additional, variable force on the wall and it’s leading edge, which is not ideal.
Second option addresses this problem by occasionally adding some holes into the outer wall, which should act as pressure release. This of course also makes the wall less certain to produce a solid boundary: we can no longer be certain that the object has been entirely separated from the environment, only mostly sure. The larger the holes, the less certain we’ll be; but for very small holes surface tension can cause problems with vacuum removal. One way to resolve this problem would be to close the holes once the wall is complete, and the pressure has been equalized.
Third option abandons the wall entirely in favor of an imaginary wall (we still need it for the area limit) We simply trace the object with the leading edge (the only thing left in the test) and wait for the leading edge to contract on itself until nothing is left. We get no guarantees that the object was separated from the environment: at best, we know any given point on it’s boundary has been separated at least once. If someone glued something to the back of the object before the “wall” closed, then our imaginary object boundary would go straight through the glue, and whatever object-based spell you are about to use will break it right off. A benefit of this method is that it has no vacuum issues.
Fourth option is something of a compromise: instead of a solid wall, we have a semi-permeable wall. For example, it can let nitrogen and oxygen molecules through, but nothing else. This may solve the vacuum problems, but potentially introduces a lot of other, unpredictable issues. It is also not clear how to create a consistent whitelist for molecules or atoms (for example, if water is allowed through so that object selection works underwater, how do you prevent ice from going through?). Overall, I think this is a poor option.
Now that the main wall types have been outlined, we should talk about the leading edge of the wall. The core issue here is how does the test lead determine where to go. This is not a trivial question, because we have somewhat contradictory requirements for it. We don’t want the test lead to exert enough force on nearby materials to break them, but we do want it to get into cracks and holes, even if they are kept closed by a significant force. Imagine that we are trying to select a fridge as an object: we would want the test lead to get in the gap under the fridge legs, even though that involves lifting the entire heavy fridge by the width of the test lead. Force needed to do that is going to easily crack thin plastics, so we clearly need some way to modulate it based on the surrounding materials.
In addition to that, there are cases where force applied at point A causes the object to break, or significantly deform, at point B. Imagine a very long branch, with a force applied at the end of it: the branch may be totally fine at the point where the force is applied, but will snap off where it’s attached to the tree. Sometimes this won’t involve complete destruction: for example, if you apply forces to a paper crane, it will easily crumple, but the paper itself will remain largely whole. Obviously, we don’t want to crumple paper cranes simply by casting object-dependent spells on them.
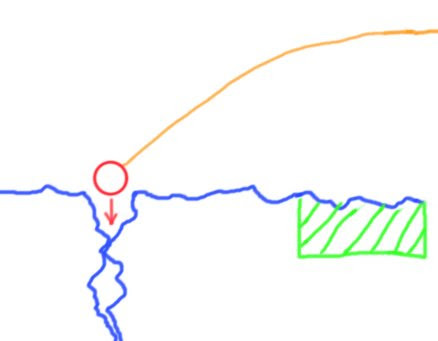
The answer, in my view, is two-fold. First of all, the test lead has to scan materials in the immediate vicinity (by whatever method) to determine their yield stress equivalent. Second, it should try to push into materials with a force below their yield stress, times the surface area of the lead. If the test lead goes “into” the material, then we have found a gap.
A small nearby part of the object should be fixed relative to the outer test boundary, to make sure the sum of the forces on the object is zero: this makes all deformations local, preventing the object from being broken at a distant point. Furthermore, because we are limiting the force by what the materials can handle without permanent deformation, we know our selection method will not destroy the object. Size of the lead and the maximum force it can exert are key for determining what kind of gaps it could get into without overcoming these limits: therefore, by varying these two parameters, we can get different object selection properties.
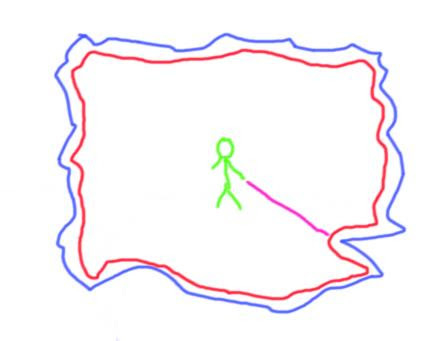
There is an unusual failure mode when it comes to this object test. If the caster happens to be inside of a sealed room, and tries to cast an object-dependent spell at the walls, then there is no way for the selection boundary to encompass the walls. Instead, the boundary will close around the contents of the room, by following the contours of the walls and not finding any gaps. Two things are possible when this happens:
Spell fails: no object is selected
Spell selects the wrong object: everything within the room, including the caster. Spell effect then happens to this selection, potentially killing the caster.
Overall, this test is very functional for household objects: things you can lift and carry around. It is also fairly versatile: by varying the size of the test lead, we can select a piece of fabric (test lead size in mm) or an individual thread within that fabric (test lead size in micrometers).
5.2 Shear line detection
Aside from the self-enclosure, there is another case that the Boundary Encasing test can’t handle. Imagine that we have an object inside of a box that is completely sealed. There is no way for a spell to select just the enclosing box from the outside: it will necessarily select both of the objects.
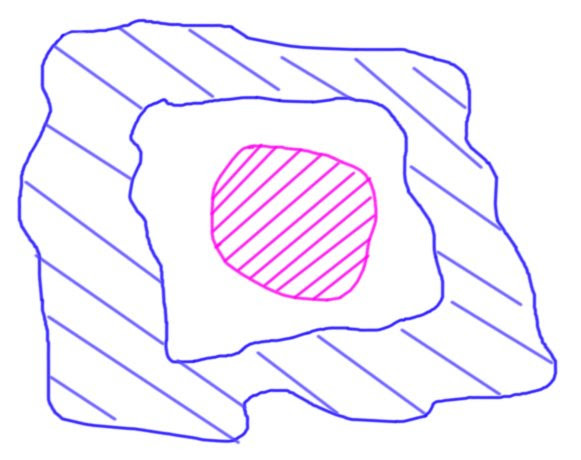
Shear Line Detection is a method that handles this case. Instead of trying to wrap the object in a bag, we try to find all the object edges directly, by trying to find locations in space that shear easily. These locations form surfaces, and we define objects as regions in space between these surfaces.
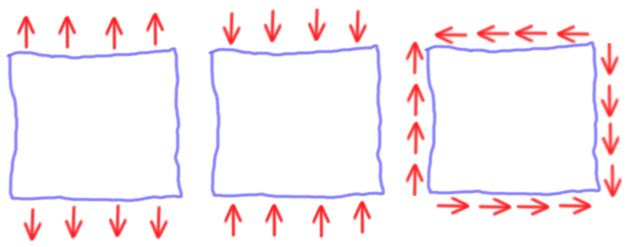
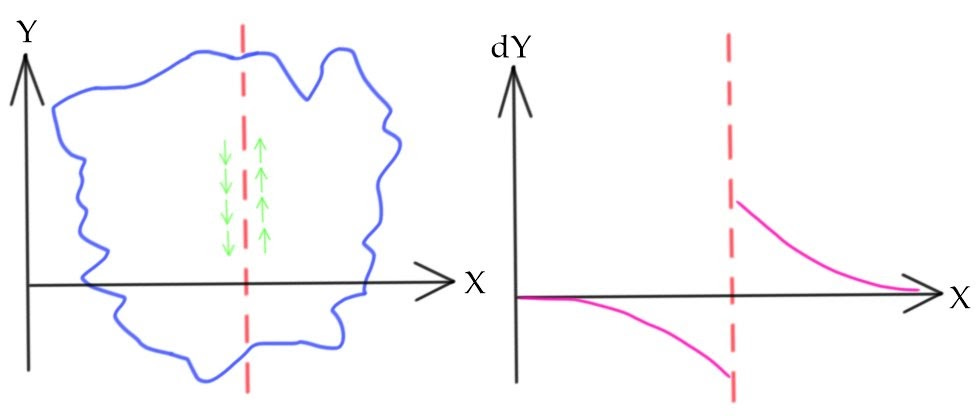
First, we have to discuss what shear is. When forces are applied to materials, atoms within them change their positions slightly, getting closer together or further apart. Atomic bonds within the material resist this, and this interaction results in a lot of varied effects - fracturing, deformation, creep, and so on. In order to model these effects, as well as the overall distribution of forces within the material, physicists came up with the concept of stress.
If you look at a simple two-dimensional picture, it’s easy to see that there are three principal things you can do with the material. You can compress it; you can stretch it; or you can try to move it “sideways”, which is called shear. Every other kind of force you could apply would simply be a combination of these effects. Here the piece is considered small enough we can ignore any variation in the forces along its length.
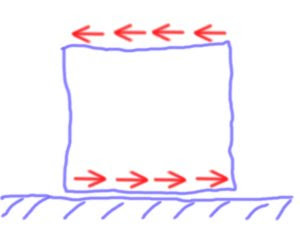
For our purposes, shear is notable because that’s the mechanism for friction. If friction is acting on some surface, that surface will be loaded in shear. And if one object manages to slide against the other one, then it is clear that the resistance against shear immediately at the surface has to be smaller than resistance to shear within either of the two rubbed objects. If it was not, then instead of movement we would see shear cracks forming within the two objects.
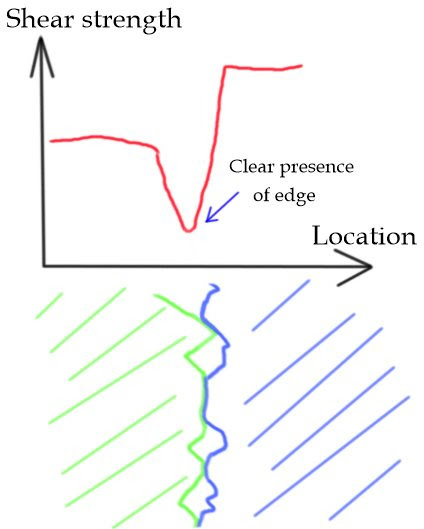
We can thus see how one could determine where an object surface would be by trying to find locations where shear strength goes down significantly, over a small area, before going back up. Test in this case would take the form of applying some forces over an area, and seeing what force it takes to shear it. This obviously requires a counterfactual world setup, because this test is destructive.
Obviously, we aren’t looking for any old dip in shear strength. Some materials have different shear strengths depending on where you measure it (e.g. wood, parallel / across grain), and so simply noticing a dip is not sufficient. Instead, we are looking for a significant dip - for typical contact situations my back of an envelope estimates say you are looking for at least three orders of magnitude difference.
If no sharp dip is present (because shear strength goes down gradually over a larger distance), then there is no object boundary here.
Obviously, we also want to handle cases where an object contacts something that shears as easily as any boundary - for example, a gas or a liquid - but the transition is also very smooth and gradual, as was the case with the glass example from section 4. In this case, it will make sense to define a minimum shear strength necessary to consider something part of an object. This can also be seen as an alternative solidity definition.
Overall, this object definition focuses on the intuition that objects can be moved relative to one another without being “glued” in place. In most cases, it is relatively easy to apply - just imagine sliding one object over the other, and think wherever they will start getting torn up in the process like a well-glued paper sticker on the back of a DVD box. However, in some scenarios this becomes harder, for example when dealing with unfamiliar materials. It also requires the spell to somehow pick which objects to affect once it finds all the boundaries - as I’ve discussed in section 4, we should be able to affect the entire pen as one object, even though it obviously has shear surfaces between individual parts.
It is also fairly hard to modify. Sure, there are a lot of very clear parameters one can vary to change how this method works - minimum shear strength, ratio of shear strength drop at the boundary, width of the boundaries, duration of the shear test, and so on - but it’s pretty hard to guess how this would change the actual object definitions. Without access to a physics simulator, or a very solid engineering intuition, all of these changes would be completely abstract and thus effectively useless.
5.3 Composition continuity
Looking back on the Pathfinder rules I have described in section 2, we can notice that our first two test methods can’t cover one very specific case - a pool of mud being counted as an object, on account of that pool being fairly liquid. Furthermore, another intuitive situation from section 4 - that of a metal pen being encased in more metal - is similarly out of our reach.
In order to handle these cases I propose a third method of object selection: Composition Continuity. It is largely based on a very similar theoretical basis to what we have employed in section 5.2. Basic principle is that instead of using shear to define borders of objects, we use atomic composition.
Similarly to how we have defined an object surface as a location where shear strength dips significantly over a small distance, we can define it by looking for sharp changes in atomic composition: for example, the amount of any element going up or down by as much as 10% relative to its original amount. Amount can be measured as a percentage of atoms within the small area, or as a density - which would make handling gasses much easier. Trace elements may be ignored until their concentration reaches whole percentage points. This lets us select a metal object encased in a different metal, and a pool of mud surrounded by stone or earth (both of which are much drier, and thus will have much less hydrogen in them due to lacking water).
This kind of selection method, while functional, has its problems. For example, it can’t differentiate between molten and solid forms of many materials. While handling water ice is relatively trivial (due to the significant change in density), many materials (such as glass) don’t change much at all when solidifying. It is also relatively hard to apply, because atomic composition of many materials is not obvious from the outside. You will thus often have to look it up online, and data on composition can be hard to find (speaking from experience making a gamma ray absorption calculator).
By relaxing the tested property from detecting changes in atomic composition to changes in material composition (e.g. finding continuous areas made out of a specific kind of wood, or plastic, or stone), this method can become easier to apply. However, this comes at the expense of increase in ambiguity in edge cases. Similar trade-off happens if liquid and solid forms are classified as different materials (at what exact temperature is glass supposed to go from “liquid” to “solid” given that all properties vary completely smoothly?) Such a “weak” composition continuity method, in my opinion, can only be used as a heuristic.
Overall, I find both the weak and strong versions of this method to be unsatisfactory. It can only be used, in my view, as supplementary to the Shear Line Detection method, to detect some extra boundaries that method would miss.
6. Spell bridging law
I won’t go into much detail here, because of how many different ways to implement each different test there are. The only key thing to mention is that each test can be done in the real or counterfactual world. For the Boundary Encasing method, doing the test in a counterfactual world would make concerns about vacuum significantly less important. Doing it in the real world, on the other hand, may leave all sorts of forensic evidence. Furthermore, depending on the width of the test lead, you may see the objects move around.
Shear Line Detection is best suited to the counterfactual implementation: by its nature, it risks shearing right through your objects, destroying them in the process. If it is done at sparse points, then it could be used without counterfactuals, but it’s accuracy significantly decreases.
The Composition Continuity method is mostly analytical: it does not rely on any actual explicit tests. As such, it doesn’t matter in which world it is used. However, in my view, it should always be coupled with Shear Line Detection.
7. Spell object selection
Unlike the Boundary Encasing method, the other two tests don’t select a specific object to be affected. Instead, they detect the boundaries of all objects within the test range, thus “tessellating” surveyed space into elemental objects. However, some objects are made up out of multiple smaller objects. We are thus left with a question: which of these objects or their combinations do we pick?
Obviously, there are 2^N ways to pick a collection of objects out of N distinct ones. However, some of these ways stand out as the most obvious, and so I will list them here.
7.1 First smallest
Simplest method is to simply pick the smallest object that is closest to the spell’s target location. If the spell is aimed at some patch of material, we assume that patch belongs to the object, and select the smallest object that contains it.
This will have the effect of treating composite objects as collections of objects. For example, a spell aimed at the hood of a car will affect that hood, and nothing else. A single link in a chain will likewise be affected alone from the rest of the chain.
Because of this method’s simplicity, it’s a natural fallback in case other selection methods fail.
7.2 Closest Fit
This method selects an object or a collection of them whose boundary most closely fits a continuous image the caster has within their mind. This is a pretty convenient way of selecting composite objects if you can’t use the Boundary Encasing method.
7.3 Convex Envelope
A fairly common type of object selection involves various kinds of storage containers. We want to select a box and everything inside of it, in order to affect them together. One easy way to do this involves convex envelopes - you can imagine it as a tight convex boundary stretched over the object. Convex Envelope method of object selection selects the outer object (box) and then all objects that are fully within the convex envelope of that box.
This can have some bizarre side effects for objects that are not boxes: for example, a C-shaped length of wire would also select everything in the middle of the contour. To combat this, you can instead use a minimal surface: any surface that fully contains the selected object and has an area smaller than any other such surface. For boxes this should be equivalent to the convex envelope selection, but for more “open” shapes it would hug the objects tighter.
7.4 Freedom wiggle
As I've described in section 4, one of the intuitions for objects is that different parts of an object travel together. This is substantiated in section 2: according to Pathfinder rules, manacles, jewelry (e.g. chain lockets) and amour (e.g. chain mail) are all considered to be objects. However, none of the object tests we have would select any kind of chain-like object as a single entity by default. Shear Line Detection would naturally only select a single link. Boundary Encasing may select the whole chain, but for that we would need to use boundary thickness that is as thick as the distance between the chain links: that would make it very inconvenient to use.
A similar problem occurs when trying to create a method for selecting ropes. Shear Line Detection would select individual fibers within the rope instead of the whole thing; on the other hand, Boundary Encasing would fail to select a rope that is tied to a larger object, because boundary thickness required to separate the knot from what it is tied to is fairly likely to separate individual fibers one another. We clearly need a new solution.
This is where the Freedom Wiggle object selection method comes in. The basic idea is that first, space is tessellated into elemental objects. Second, we select the object closest to the target point of the spell. Then, we go through nearby objects, and check wherever we can separate our object from them by any sequence of movements, wiggling, pulling, or anything else. If we can, great - we are done. If we can’t, then we also select the other object, and we keep doing this until the entire selection can be separated from everything else (or we reach the limits of the spell).
Let’s start by defining separation of objects. Each object or group of objects has a boundary; this boundary has a convex envelope. Two objects or groups of objects are considered separated if their convex envelopes don’t overlap.
If the objects are not currently separated, but there exists a sequence of moves that would make them separated, then they are considered to be separable. They are considered inseparable if, even assuming all other nearby objects were gone, there would be no sequence of moves that would separate them. If they would be separable when considered in a vacuum, but inseparable when considered alongside some other nearby objects, they are considered semi-separable. An example of a semi-separable object pair are any two of the Borromean rings.
Here “sequence of moves” can be grouped into three broad categories:
No shape change: during the moves, boundary shape of either of the objects is not changed at any point, and boundaries do not intersect. This is the strictest limit one can impose on the moves.
Elastic shape change allowed: objects can deform, as long as they stay entirely in elastic deformation mode. Plastic deformation and cracking is not allowed.
Sequence of moves involves plastic deformation of at least one object.
Because there obviously always exists a sequence of moves that separates two objects while involving plastic deformation (i.e. tear them apart and then separate), I think it’s reasonable to say that separability can apply only to the two former classes - if plastic deformation has to be involved, objects are inseparable. We can call the remaining two classes “Strong separability” and “Elastic separability” respectively.
We can likewise differentiate the sequences of moves by how long they would take to execute. Because the speed of moving objects relative to one another is going to be somewhat arbitrary, we can arbitrarily decide that we will limit it to half a meter per second at most, about what I can imagine to be the speed of a human quickly disassembling something. We can then measure the length of the sequence of moves as the time it would take to execute that sequence with our max speed limit. Intuitively, you can then understand a “5 minute long sequence” as “it would take an experienced person with many many hands about 5 minutes to disassemble this collection of objects into constituent parts”.
Next key factor when considering separability is the amount of nearby objects. I have already mentioned this when defining inseparability: for example, two chain links can’t be separated even if every other nearby object disappeared. On the other hand, separability of something like a door lock heavily depends on what objects are present: any two parts of the mechanism considered in a vacuum are easy to separate, but once assembled the elements interact such that separation becomes difficult. Of course, we can’t say that all nearby objects have to be present for consideration either: otherwise you can turn any two objects into a single one by putting them inside of a tight sealed box, such that separation is impossible.
Finally, we have to consider the forces applied during the separability test. This can mean their magnitude, or the number of points that some force is being applied to. Magnitude is easiest to limit by limiting the acceleration of objects, and can be measured relative to the kinds of accelerations achievable by human hands.
Overall, there are many possible combinations of parameters here, with many different sub-variants of this selection method being possible as a result. In fact, there are so many possibilities that I am struggling to draw general conclusions. At the very least, I hope we can say the following:
If two objects are inseparable, they can be treated as the same object (e.g. chains)
If two objects are strongly separable within seconds while all nearby objects are present, they should be treated as separate objects.
If two objects can’t be separated in under 10 seconds, they should be treated as the same object.
If two objects are at least elastically separable by simply shaking or wiggling one of them for five seconds, they are separate objects. If they can’t, they may be treated as one object, though it could also be the case that our test is faulty.
These four heuristics may not seem like much, but I think they will cover a decent number of cases. Furthermore, the overall framework should let you design your own wiggling tests, should that become necessary.
7.5 Pile Grouping
As I’ve mentioned in section 2, when talking about the Shrink Object and Polymorph any Object spells, there is a very reasonable argument to be made that Pathfinder rules consider a campfire and a pile of sand to be objects. Of course, on a physical level, a campfire is simply a pile of completely independent fire logs.
In my opinion, it would be crazy to say that a pile of completely random things can be considered an object. The only reasonable conclusion I can draw that still treats campfire as a single object is that a continuous pile of similar objects (e.g. logs, or sand grains) should be treated as one.
This is a risky decision. It potentially introduces the concept of similarity between objects into our rules, which is a massive source of potential ambiguity. Just think about how subjective that sort of thing is!
Unfortunately, this post is already getting rather long for a rather specific topic. The question of similarity will thus have to wait until I get around to discussing spells like Locate Object, which have to rely on some notion of object/image equality in order to work.
For now, you can use the following rule of thumb: if a third party couldn’t identify a specific object in a pile based on a short verbal description of it, objects in the pile are similar enough to count as a pile, and thus can all be selected at once.
Once you have a similarity measure, pile selection method is actually fairly simple:
Select the object that contains the targeted material patch
Find all objects similar to the initially selected one that touch any of the currently selected objects
Select them
Repeat 2 & 3 until no new objects can be selected. The total set of selected objects is your pile object.
Overall, I would prefer it if rules did not treat piles as objects, and would advise you to rely on this kind of object selection very sparingly.
7.6 Arbitrary Choice
The most general method gives caster full freedom of choice in regards to what object to affect among all possible ones that contain the target material patch. Logically, caster either has to design this selection method in advance, or transmit it to it once the spell gets in place. If the latter method is used, it’s not unreasonable to expect the caster to have a map of the containing objects to make a choice between them.
This selection method gives caster almost an arbitrary degree of choice. This can be both a good and a bad thing. Good comes from the fact that “accidents” with object selection become much rarer. Bad comes from the fact that caster has a massive degree of choice, ripe for exploitation. And even though object tests should handle most of the possible exploits, there is still a lot of freedom left. Wherever that’s something you want is up to you.
As a weaker version of this method, consider letting casters combine previously described 5 selection methods in any order and combination.
8. Rules conformity check
Finally, let’s do a quick check to see how well our new tests for something being an object fit the Pathfinder rules discussed in section 2.
The most universal object selection method, in my view, is Shear Line Detection supplemented by Composition Continuity, with Freedom Wiggle and defaulting to First Smallest. It should handle the vast majority of object-selection problems with no issues. Armour (including chain), jewelry, catapults, ships, etc, all are handled nicely.
For piles of items, granting the caster an option of either using Pile Selection (thus selecting the whole pile) or selecting the individual targeted item should work fine.
The Boundary Encasing method has its uses: in my view, it’s best for spells which modify the affected object. This means any kind of transfiguration, size or composition changes, as well as teleportation. By isolating the object during the selection process, you can also isolate the effects of the spell from the environment, and minimize unpredictable side effects.
Other object selection methods seem to me to be largely situational, but specific magic effects might make more sense with them in mind.
In regards to Brilliant Energy and similar effects treating creatures differently from objects, I can see two explanations. First one is that Brilliant Energy does damage in a way that is significant for biological creatures, but irrelevant for objects. For example, high doses of radiation cause lethal damage to animals, but leave most objects overall unaffected (radiation does damage materials, but fairly slowly). Second is that Brilliant Energy does soul damage: any creature with a soul would be affected. Because it does not affect Undead, however, this seems unlikely. In either case, I see no reason to muddle the purity of physics by enshrining creatures as a separate type. At best, they should have a Manton Effect preventing certain spells from working on any object that is occupied by a soul; and at worst, all object-targeting spells should simply work on creatures the same way they do on everything else.
Taken together, I believe that we now have a very versatile framework for object selection that fits the Pathfinder rules and our overall intuitions. I hope that the methods developed here could be helpful to other people, and they will undoubtedly be used by me in the future discussions about various types of magic.
Meanwhile, if you enjoy what I write, you can subscribe to receive updates by email:
Sources:
https://www.reddit.com/r/askscience/comments/xamjk/how_wide_is_the_very_sharp_part_of_a_knife/
Michael F Ashby “Engineering Materials 1”
https://en.wikipedia.org/wiki/Surface_roughness
https://astropak.com/surface-roughness-average-ra/
https://en.wikipedia.org/wiki/Hardness
https://geon.usc.edu/~biederman/publications/Biederman_RBC_1987.pdf
https://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.294.1979&rep=rep1&type=pdf